

We present DemoHLM, a framework that enables generalizable humanoid loco-manipulation on real robots from only a single demonstration in simulation.
Key Concepts
DemoHLM introduces a hierarchical framework that integrates: a universal whole-body controller for omnidirectional humanoid mobility,
and manipulation policies trained via imitation learning from synthetic data.
Starting from a single VR teleoperated demonstration in simulation, DemoHLM generates diverse training data and learns manipulation policies that generalize across tasks and spatial variations. Real-world experiments on a Unitree G1 humanoid robot validate strong sim-to-real transfer and robust performance across ten loco-manipulation tasks.
Real-World Demo
Loco-Manipulation Tasks (third-person & ego-view, 1x speed)
Method Overview

Overview of DemoHLM. For each task, we collect a single demonstration via VR teleoperation in simulation and record the robot trajectory in the object frame. This trajectory is used to generate both pre-manipulation and manipulation phases. A manipulation policy is trained via imitation learning and deployed on a real humanoid robot with closed-loop visual feedback.
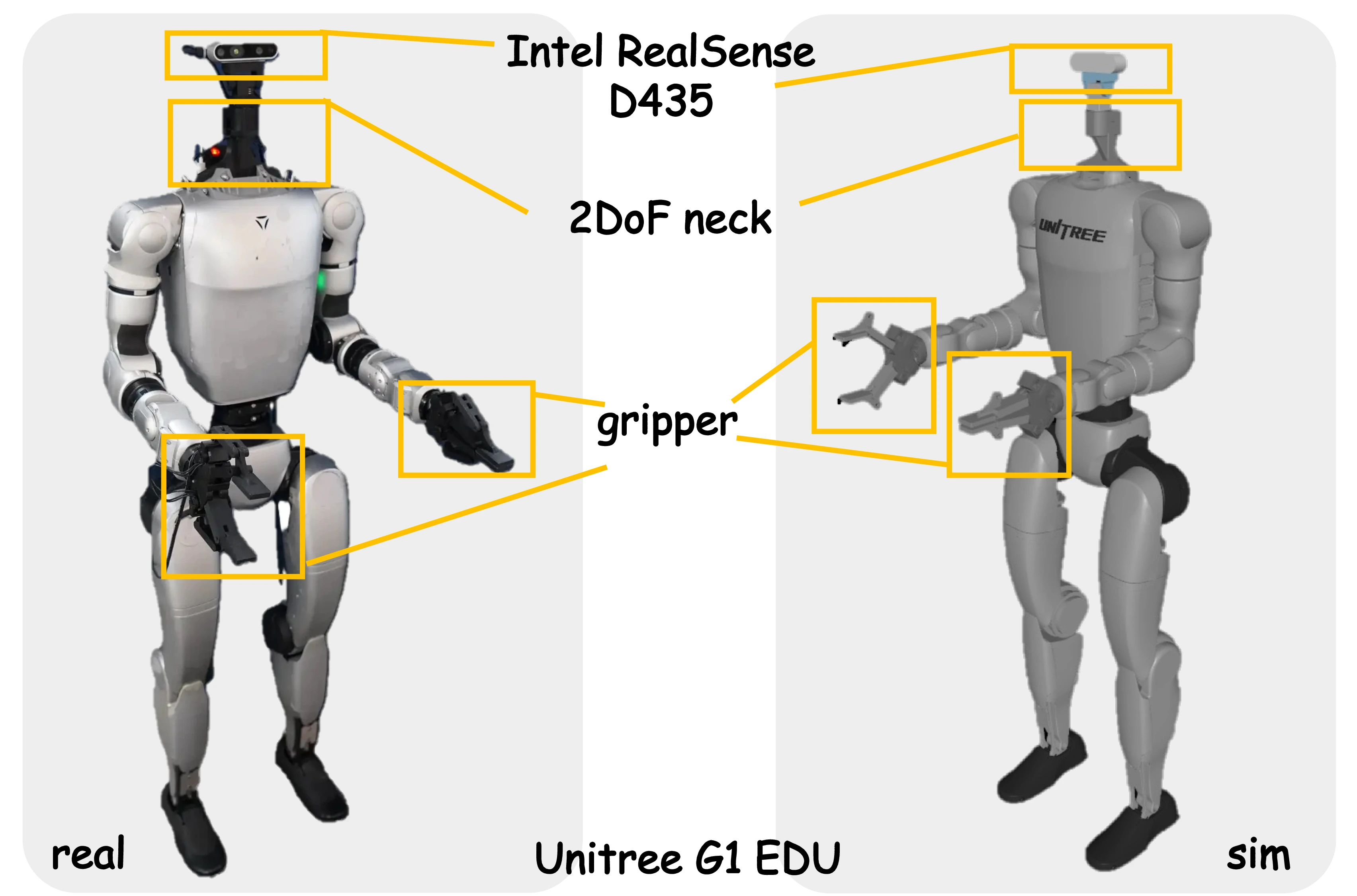
Hardware Design. We use a Unitree G1 humanoid robot in real-world experiments. To enable active vision, we mount a 2-DoF neck with an Intel RealSense D435 RGB-D camera. For tasks involving small objects, we attach parallel grippers to both end effectors.
Experiments
Scaling Performance
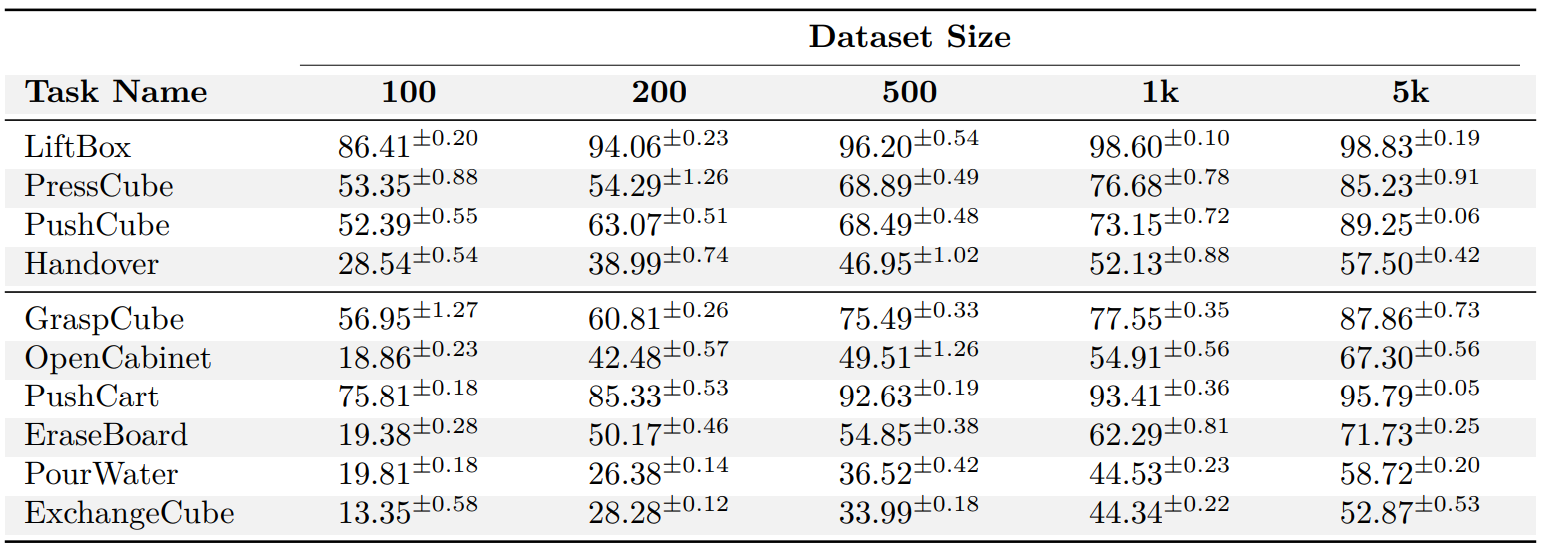
Success rates (%) of all tasks in simulation given different sizes of synthetic datasets.
Real-World Experiments

Success rates of real-world test.

Real-world policy rollouts. Each pair of rows shows time-aligned first-person and third-person views. Frames progress from left to right over time, demonstrating robust performance under spatial variations.
Citation
@article{demohlm2025,
title={DemoHLM: From One Demonstration to Generalizable Humanoid Loco-Manipulation},
author={Fu, Yuhui and Xie, Feiyang and Xu, Chaoyi and Xiong, Jing and Yuan, Haoqi and Lu, Zongqing},
journal={arXiv preprint arXiv:2510.11258},
year={2025}
}