

We present FAST, a general humanoid whole-body control framework that enables Fast Adaptation and Stable Motion Tracking.
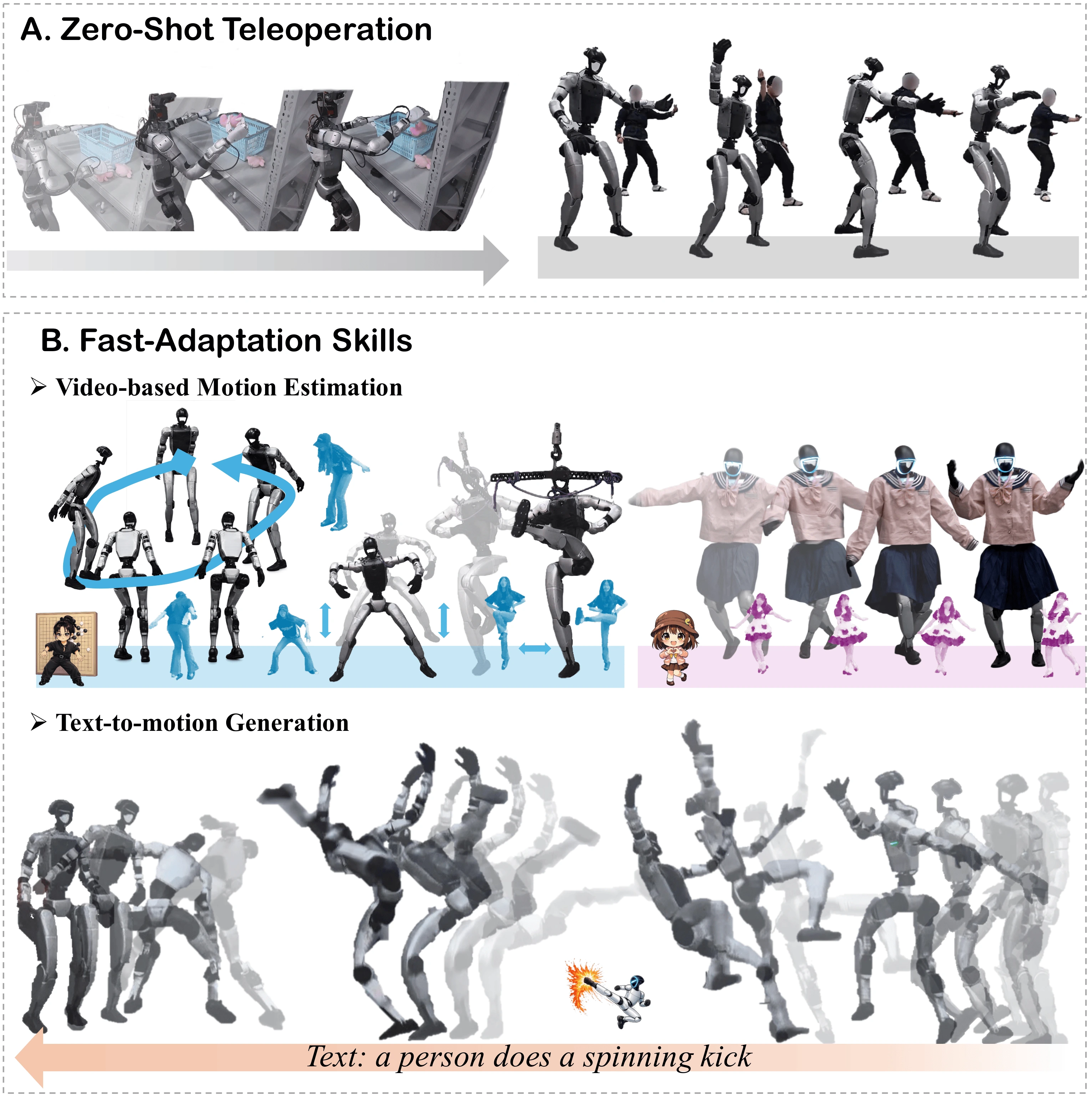
FAST enables zero-shot high-dynamic motion tracking and real-time teleoperation with strong robustness and balance beyond simulation. For low-quality or out-of-distribution motion references, FAST further supports lightweight residual adaptation for rapid and stable specialization.
Real-World Demo
Method Overview
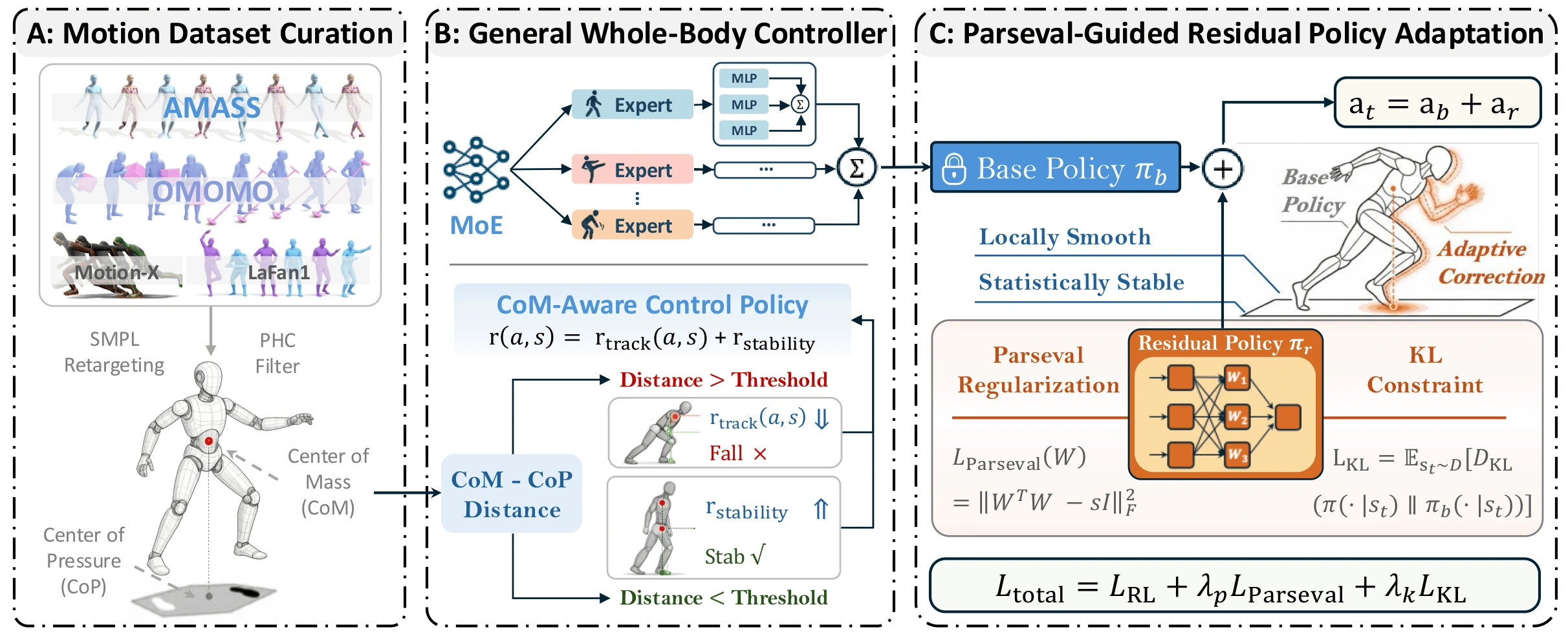
An overview of FAST. The framework consists of three stages: (1) We construct a curated humanoid motion dataset via human-to-humanoid retargeting with auxiliary physical signals. (2) We train a general whole-body controller with a Mixture-of-Experts architecture and Center-of-Mass-Aware control. (3) We perform fast adaptation via Parseval-guided residual policy learning.
Experiment

Abaltions on fast adaptation results on target adaptation dataset (LaFan1) and source dataset (AMASS). The result demonstrates that combining Parseval and KL regularization enables fast adaptation with a favorable balance between target-domain performance and source-domain preservation.
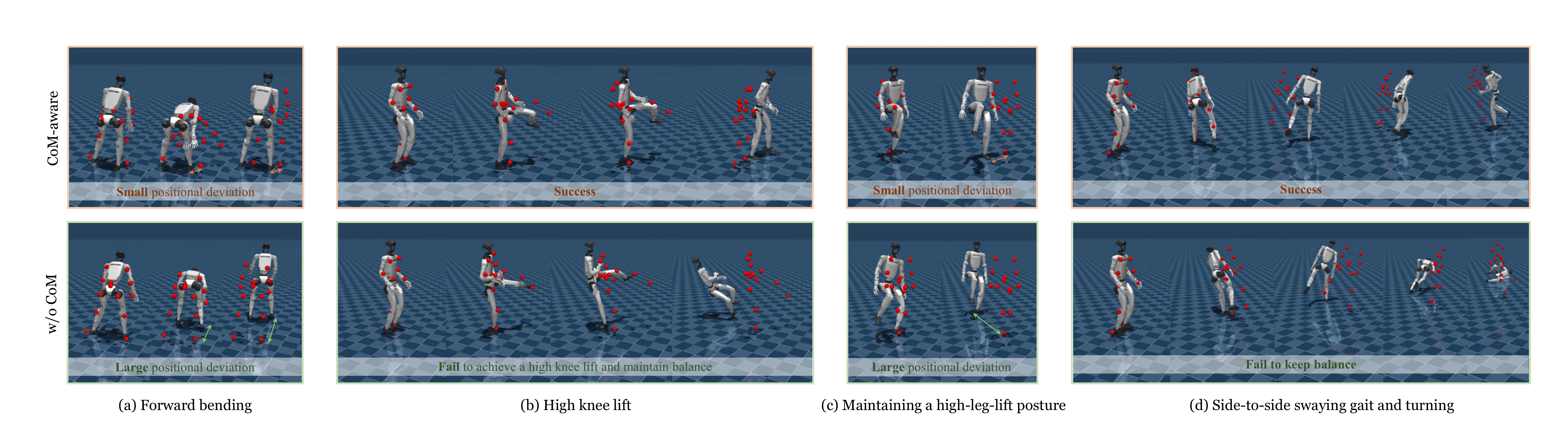
Visualizations of representative motions comparing CoM-Aware Control with the baseline. CoM-Aware Control consistently maintains balance and reduces instability, while the baseline exhibits drift or falls.
Citation
@article{wang2026fast,
title={General Humanoid Whole-Body Control via Pretraining and Fast Adaptation},
author={Zepeng Wang and Jiangxing Wang and Shiqing Yao and Yu Zhang and Ziluo Ding and Ming Yang and Yuxuan Wang and Haobin Jiang and Chao Ma and Xiaochuan Shi and Zongqing Lu},
journal={arXiv preprint arXiv:2602.11929},
year={2026}
}